
在智能工厂中,物料的转运是完全自动化的,在转运站场景中自动导引车(AGV)和机器人之间的物料转运需要全面考虑传送站的安全功能。这包括自动导引车进入转运站、到达转运位置和离开转运站三个过程。
自动导引车本身可通过内置的安全传感器来确保安全,而机器人则装有可以识别是否有人员接近危险工作区的传感器。但是,要实现机器人和自动导引车之间的自动物料转运,流程中还涉及到不同系统控制单元(机器人、自动导引车和物料流控制)必须能够相互通信,以确保整个运行周期的安全性和可靠性。
全自动安全转运流程的要求
传统的方法通常使用安全光幕来防护自动导引车和机器人之间的转移区域。尽管这在技术上是可行的,但它的安全防护范围有限,无法自动监控转运区内的人员,以往的方案还需要进一步的安全预防措施,比如安装围栏等。而现在的自动导引车和机器人之间无物理屏障的全自动安全运转方式无疑是一种更有效的解决方案。然而,该系统必须能够可靠地区分人和自动导引车,需要具备以下条件:
自动导引车转运站的危险区域必须在整个过程中得到保护
自动导引车应能够以完全自动化的方式穿过和离开工作区域
必须始终识别出人员或其他偏离自动导引车轮廓的情况,从而触发停止信号
劳易测为保护机器人/自动导引车转运站开发的解决方案确保了两个安全功能:
停止机器人的危险运动
动态调整自动导引车周围的保护区域
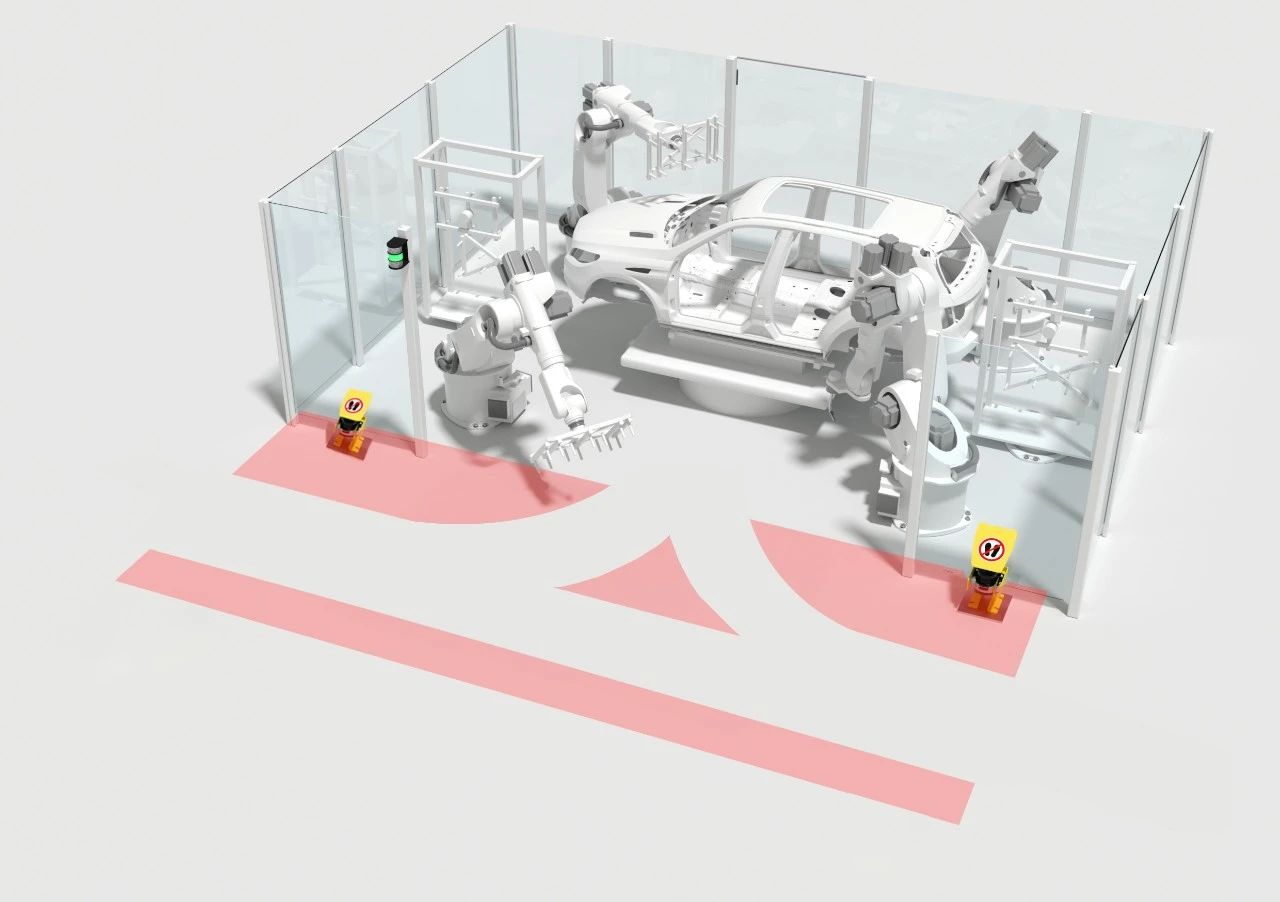
为了确保整个转运站区域的安全,我们采用安全RSL 400激光扫描仪检测人员是否进入转运区域。一旦出现这种情况,系统就会触发停止信号。与此同时,自动导引车在监控区域内的位置也会随时被识别。为了使自动导引车本身不会触发停止信号,安全程序会将其轮廓从安全区域中屏蔽掉。这样,保护区域就会围绕移动的自动导引车进行动态调整。自动导引车可以自动驶入站台,在停放位置传送物料,然后再次驶出站台。


在自动导引车需要竖直方向进入转运站的情况,可以把两个 RSL 400 安全激光扫描仪分别直线安装在机器人单元的左右两侧。
从风险评估到方案实施
任何想要在其自动化系统中实施这一安全方案的企业都需要经验丰富的合作伙伴。重要的是,安全专家需要全程参与,设计并实施量身定制的解决方案。首先是风险评估,必须明确界定危险源(如机器人区域内的危险),还必须了解机器人停止的速度。在此基础上,可以确定保护区域的大小和运行时间。在这些步骤中,劳易测的安全专家会是您最合适的合作伙伴,我们会对现场情况进行评估,确定要求并制定安全方案,组件安装完成后提供相应的文档支持,并对传感器进行参数设置和调试以及应用程序的最终验证。通过使用保护机器人/自动导引车转运站的安全设计,可为您在整个机械生命周期内提供全面的安全性。该安全方案符合 ISO 13849-1 PL d性能等级,以及 IEC 62061 的 SILCL 2 安全标准,可靠地将事故风险降至最低。
如您对此方案感兴趣,或想了解更多安全解决方案,欢迎扫描下方二维码填写您的安全需求,劳易测的安全专家将会与您联系。

(劳易测)





































































 京公网安备 11011202001138号
京公网安备 11011202001138号