
工艺介绍
自2007年【限塑令】实施以来,塑料包装受到了极大的限制。随之,以啤酒罐、茶叶罐、机油罐为代表的各类金属罐制品愈发增多,金属包装开始迎来飞速发展的时期,
金属制罐分为罐盖和罐身两部分,罐盖经过金属板原料的裁片、冲压、卷边和涂胶等工艺制成。目前,由于人工成本不断上扬,“机器换人”的需求迫在眉睫,而如何以更低的成本导入机器,又能达到柔、准、快三个特点,是金属包装行业亟需解决的课题。

金属盖涂胶机器人设备
课题
1. 受到机械误差、机器人误差、出胶头歪斜幅度和工艺误差等多因素影响,涂胶轨迹精度难以达到要求。
2. 购置成套并联机器人成本高昂,且示教过程繁琐,依赖熟练技术人员的感性与经验。
解决方案
1. 优化检测算法,精准定位起点坐标,实现高精度轨迹控制
金属盖是冲压成型,工艺精度±0.05mm,机器人轨迹跟随的精度在机器人算法的优化下可达0.01mm,已达到要求。因此,四周边缘的涂胶可采用固定形态轨迹,根据视觉定位的起点位置和倾斜角度进行整体调整。
因为矩形盖的倾斜角度很容易获得,所以定位的关键就是起点的检测。经过数十次实验发现,最契合机器人动作方式的轨迹起点,是在右上角弧边与直边交点向盖内侧方向的位置上。
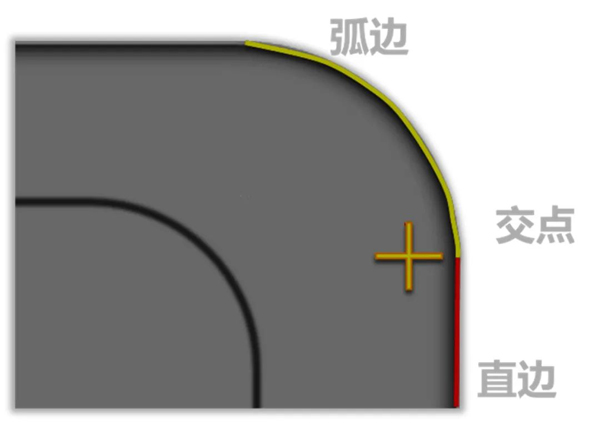
而由于实际情况下每台设备的机械误差、机器人误差、出胶头歪斜幅度和工艺误差综合起来都是不同的,因此起点位置依然会存在变化,需要进行微调。我们通过优化检测算法,使设备能够精准量化起点坐标,简化轨迹的微调,降低操作难度,如此一来,即使是无经验的操作人员,亦可将轨迹精度控制在±0.2mm以内。
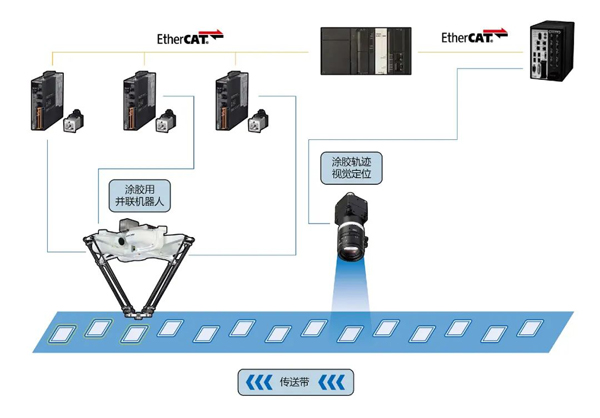
2. 借助EtherCAT通信指令控制功能,实现新品的全自动示教
首先,欧姆龙仅通过控制器+伺服的方式,实现了涂胶的运动控制,仅需简单搭建机械结构即可,无需耗费大量费用购置并联机器人。
其次,PLC通过EtherCAT通信发送“场景复制”指令给视觉,视觉会在指定位置以模版场景为蓝本新增一个新场景,模版场景中有IF分支用于程序运行模式和示教模式的切换。
然后,继续通过EtherCAT通信的数据写入指令,将长宽尺寸等必要数据写入视觉新场景的指定单元存储起来,留作测量区域和限值范围的自动设定参照。
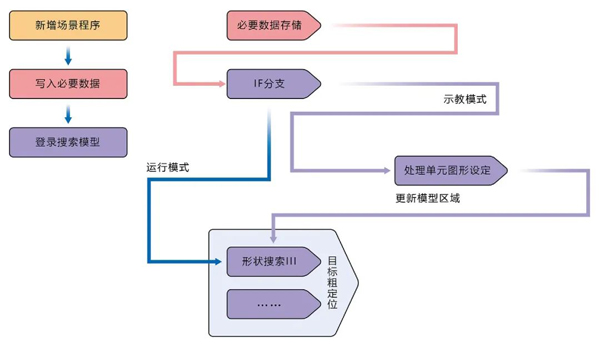
最后,再通过通信指令控制视觉执行示教,也就是切换分支后触发执行测量,新场景程序就会以示教模式运行,此时示教分支内的处理单元图形设定就可以刷新形状搜索Ⅲ的模型区域实现当前图像下的模型登录,新产品的测量程序也就示教完成了。
控制系统
机械自动化控制器 NJ / NX系列
AC伺服系统 1S系列
图像处理系统 FH系列
实现价值
1. 精度:
精确到±0.2mm的动态涂胶轨迹精度
实现了210×280mm视野范围内精确到±0.2mm的涂胶轨迹高精度定位,可兼容不同尺寸和圆角半径的金属盖涂胶,且微调简便。
2. 省工时:
2min以内的新产品检测程序全自动示教
实现了新场景自动生成、参数数据自动写入、搜索模型自动登录、测量区域自动生成等功能,新品示教过程时间压缩到2min以内,其中最简单的三个操作由人工完成,其余的场景新增、数据计算和模型登录均由设备自动完成。
【经营层】
■ 在金属包装飞速发展的背景下,快速应对市场变化,通过全自动高速涂胶的方式替换传统人工,大幅提升涂胶轨迹精度,降低人力成本,助力打造业内Top竞争力。
【管理层】
■ 该系统的自动示教功能支持简便微调,即使是无经验的操作人员,亦可将轨迹精度控制在±0.2mm以内,缓解了对熟练技术人员的依赖,降低人工成本,减少不合格品的产生。
■ 通过自动化涂胶设备替换人工,涂胶轨迹数据以及设备运行数据均可收集、存储、分析,实现更为宏观且高效的生产管理。
【工程师层】
■ 欧姆龙机械自动化控制器NJ/NX系列,内置各类算法实现的功能块,仅需写入最基础的参数即可实现,调试简单,开发周期短。
■ 实现全自动涂胶,可兼容不同尺寸和圆角半径的金属盖涂胶,轨迹精度控制在±0.2mm以内。
(文章来源:欧姆龙工业自动化资讯号)





































































 京公网安备 11011202001138号
京公网安备 11011202001138号