
随着经济的不断增长,中国物流行业正以前所未有的速度快速发展与演进,在其发展的背后离不开商品的仓储和流动。与此同时,巨大的需求促使我国的物流行业正在努力地从劳动型向技术型转变,由传统模式向现代化、智能化升级,随之而来的就是各种各样先进技术装备的运用和普及。
如今,具有搬运、码垛、分拣等功能的智能机器人的运用,已经成为物流行业中必不可少的一项技术,智能仓储物流机器人在其中扮演着极其重要的角色。仓储物流机器人是面向商品仓储、配送环节所开发的智能机器人,可广泛运用于商品拣选、搬运、分拣等环节,也在新一代智慧工厂中扮演着重要的角色。

01 AMR的定位技术
从分类上来说,仓储物流机器人隶属于自主移动机器人(Autonomous Mobile Robot, AMR),与传统的AGV相比,AMR本身具备较强的计算能力,它可以通过传感器感知周围环境并做出相应的决策,更灵活、更智能且布置起来也更方便。
在围绕着AMR的诸多技术中,始终要回答“我在哪里?”“我要去哪儿?”和“我怎样到达那里?”的问题,这背后主要指移动机器人的感知、定位、规划和控制问题,其中最核心的就是定位问题。那么什么是机器人的定位呢?机器人在工作过程中确定自身相对于环境的位置及姿态就叫定位。
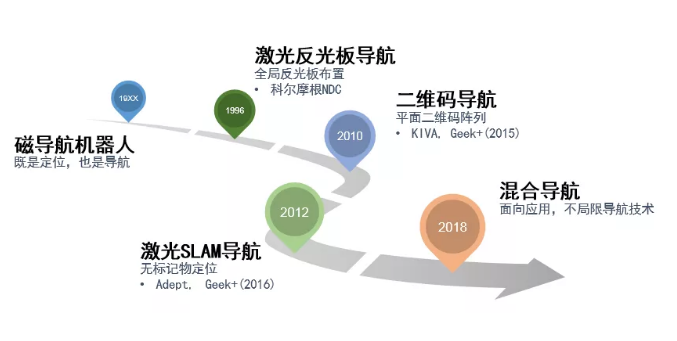
早期影响定位技术的,主要是传感器本身能力。上世纪中后期,磁导航是一个比较常用的定位导航方案。磁导航机器人也被广泛用于工业生产领域。磁导航技术既是定位技术也是导航技术,机器人利用磁传感器检测地面磁条,并沿着磁条移动。
后续激光雷达的发展推动了基于反光板的导航方案。1996年,科尔摩根公司将反光板定位导航技术NDC方案推广到中国,逐渐占领了中国主流AGV和无人叉车市场。反光板导航的方式,即在环境中布置由反光材料制成的反光板,通过机器人的雷达扫描,依据三角定位原理解算机器人位姿。
Kiva于2010年提出了二维码导航,其在2012年被亚马逊收购。随后机器人被广泛运用于亚马逊内部仓库,大大提升了拣选效率。二维码导航的方案是在地面铺设二维码阵列,通过机器人下部的相机扫描二维码实现自身位姿的估计。与磁导航方案不同的是,二维码只是一个定位方案,在机器人导航调度上灵活性更强。
考虑到柔性导航的需求,大家开始探讨无标记的定位导航方案。激光SLAM(Simultaneous Localization and Mapping)作为目前比较成熟SLAM方案,早在几十年前就在学术圈被广泛研究,直到最近10年才在机器人领域逐渐使用。极智嘉(Geek+)也在2016年开始进行激光SLAM算法研究和产品落地。
近几年各项定位技术逐渐成熟,其优势和不足也充分展现。另一方面,在应用层面的广泛需求促使AMR从一个技术导向逐渐向应用导向发展。混合定位导航方案也逐渐成为AMR的标准方案,在效率和柔性,技术难度和实施难度上达到一个均衡。
02 定位技术在仓配机器人中的应用
电商仓储 —— 二维码导航
面对高速增长的电商市场,传统物流仓储方式远不能满足行业需求。针对此场景,基于视觉二维码的导航方案是具有绝对领先优势的,主要有以下三方面原因:
首先是精度高,基于视觉二维码的方案在全局的定位精度可达到±1cm,有着较高的准确性,对声光无干扰,稳定性较高。
其次是小巧灵活,众所周知,对于电商仓储来说,存储空间是极其宝贵。视觉二维码的定位导航方案可被高效利用,即机器人和机器人之间、货架和货架之间可做到10cm的间距,对整个仓储来说空间利用率非常高。
最后是二维码导航铺设实施效率较高,运行过程中机器人可灵活调度,整体效率提升明显。机器人调度系统与仓储管理系统(WMS)相结合后,可大大降低库存出错概率。
双十一作为国内网购狂欢节日,需要依托强大的仓储物流体系。在2020年双十一期间,极智嘉在自营的智能仓内部署了近5500台机器人,通过机器人仓运营发货单量总计1319万单,同比增长超60%。整体来说,发货效率是人工3PL仓的两倍,准确率也高达99.99%。

智慧工厂 —— 多种导航方式并存
仓储只是整个体系中一个环节,对于整个智慧工厂,环节则更加复杂,包含出入库、上下料、测试和配送等。针对此场景,无法只用二维码将整个区域覆盖。另一方面,随着实际运用范围的扩大,AMR所覆盖的区域也逐渐从几千平的单一区域,转化到几万平甚至几十万平的复杂区域,各区域之间的环境和功能需求都有所不同。

面对多环节、大面积的智慧工厂应用,极智嘉提供了覆盖全场景的全品类机器人产品线,包含智能叉车机器人、智能搬运机器人、智能分拣机器人、货架拣选机器人,货箱拣选机器人、智能协作机器人等多种类型机器人,来完成多种机器人协作的完整方案。

在智慧工厂诸多技术领域中,定位导航技术仍然非常关键的,面对多环节、大面积的场景如何能够较好地解决定位导航问题呢?我们可以从从内外两方面来提高机器人的定位导航能力:
内:提高SLAM环境适应能力
通用的激光SLAM技术无法应对高动态变化下的定位精度和鲁棒性。极智嘉AMR通过局部的高精度定位和全局地图更新来适应环境变化,并不断更新地图,从而提高机器人的环境适应能力。通过实际场景的不断验证,极智嘉AMR可在环境变化50%以下的场景完成7×24小时不间断运行,精度保持±1cm。
外:混合导航
激光SLAM技术始终存在瓶颈,对于复杂环境,我们需要使用多种导航技术的融合来达到稳定运行的状态。针对智慧工厂中的线边环境,基本上环境的变动是比较小的,或者是变动的频率比较小,使用激光SLAM导航结合地图更新就可以完成该区域的定位导航。
对于环境变化较大(超过50%)的区域,激光SLAM无法保证100%的稳定性,此时少量辅助标记的引入可大大提高此环境下的鲁棒性。对于货架仓储区域,由于所有的货架是机器人是自己搬进来的,如果要用货架来进行定位,则定位结果会逐渐产生偏移。因此需要引入大量辅助定位标记,二维码导航是一个切实可行的方案。
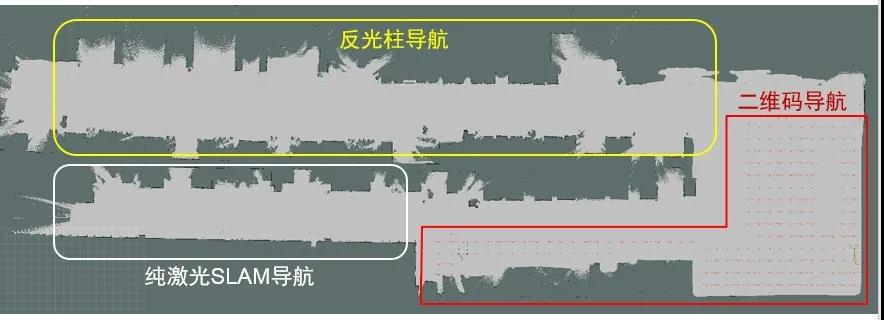
综上,针对一个真实的智慧工厂环境,AMR往往需要融合多种导航模式,来达到高精度稳定运行。
在多种导航方式融合的基础上,极智嘉在南京搭建了首个使用机械臂自动生产自主移动机器人(AMR)的智慧工厂:
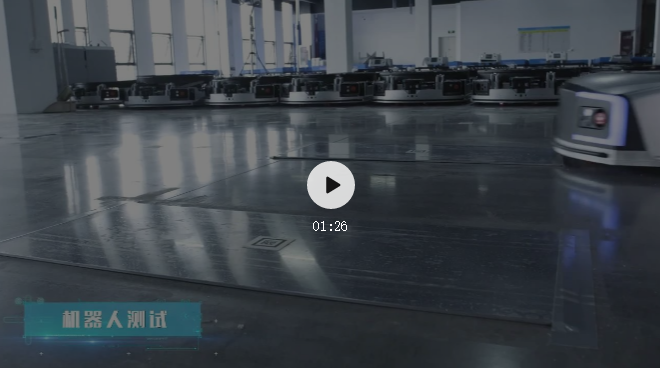
实际应用案例
▲ 英内物联网提高物料配送效率30%
▲ 柯尼卡美能达(东莞)实现线边库物料精准管理





































































 京公网安备 11011202001138号
京公网安备 11011202001138号