
本次内容会讲解【宏程序】以及【移动指令Plus】这两个小技巧来提高各位的编程效率以及提升程序的易用及稳定性。
宏程序
各位小伙伴在使用MiR编程的时候是否有过这样的经历:当需要统一修改某项参数时,只能机械地一个个进入到任务中去查找到每行对应指令去修改。这样做法不仅效率不高往往还会容易造成遗漏。那有没有什么好方法呢?这里我们介绍的【宏程序】就能大大提高您的编程效率及准确性。
这里我们以最常见的【Move命令】作为例子。
首先,进入到设置 > 任务中创建一个名为【Move Marco】的宏程序。
*您可以在创建任务的过程中同时创建一个宏程序的任务组方便之后创建的宏程序的归档。
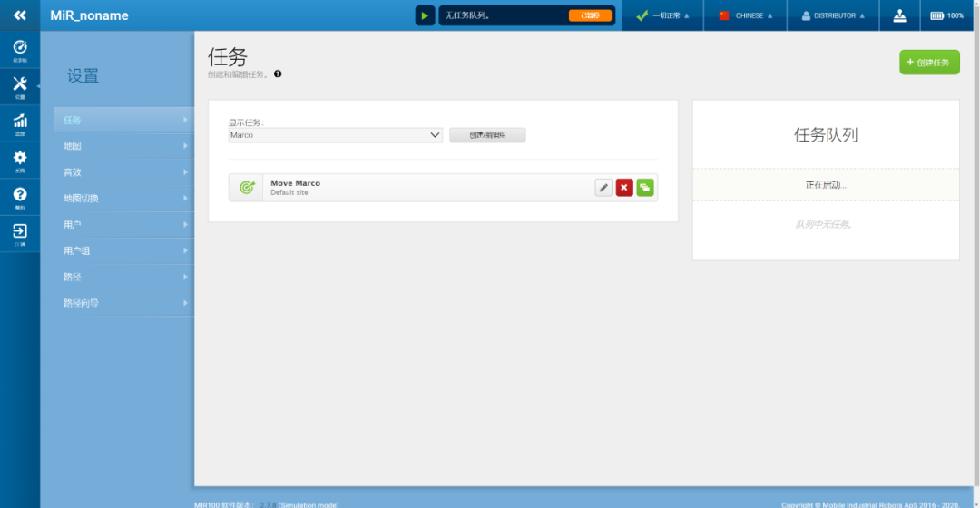
创建一个移动命令并点击?,进入参数编辑窗口。
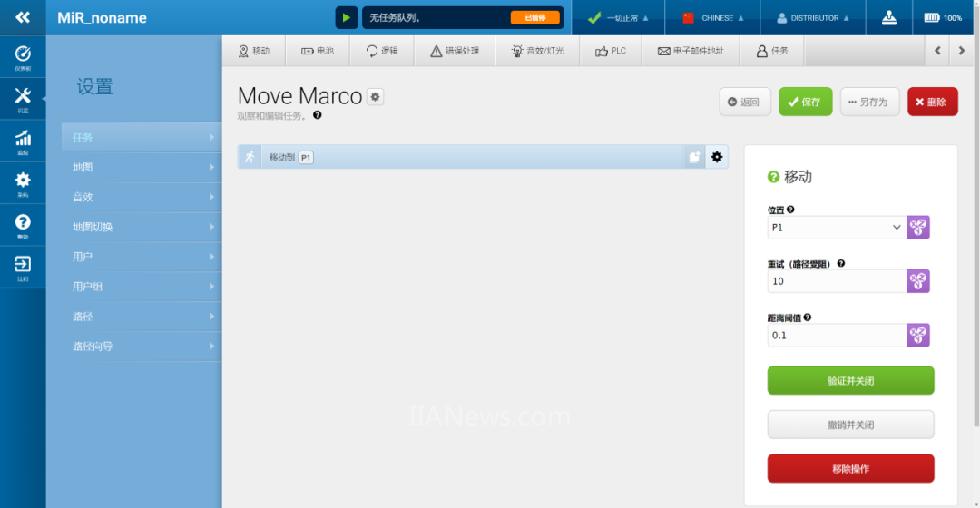
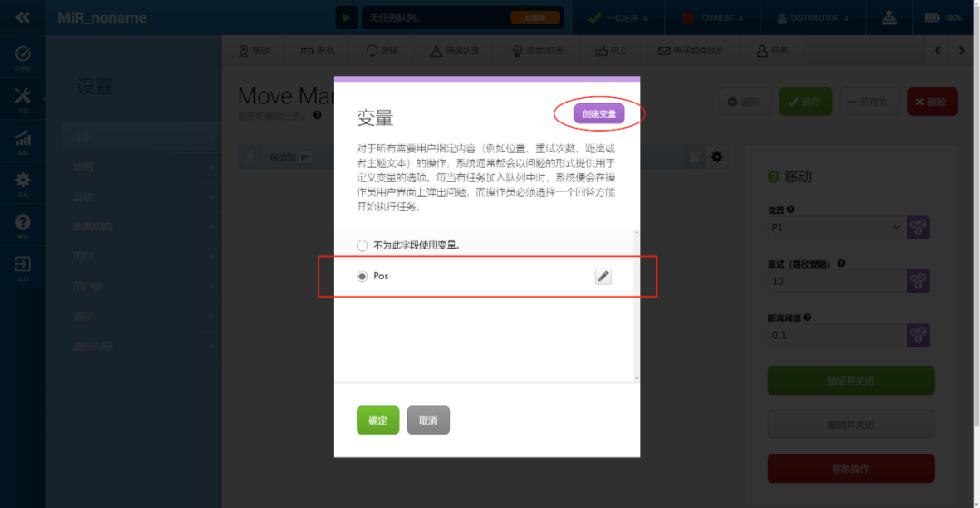
点击下图中图标创建一个名为【Pos】的变量。
在弹框中点击【创建变量】创建一个移动变量。
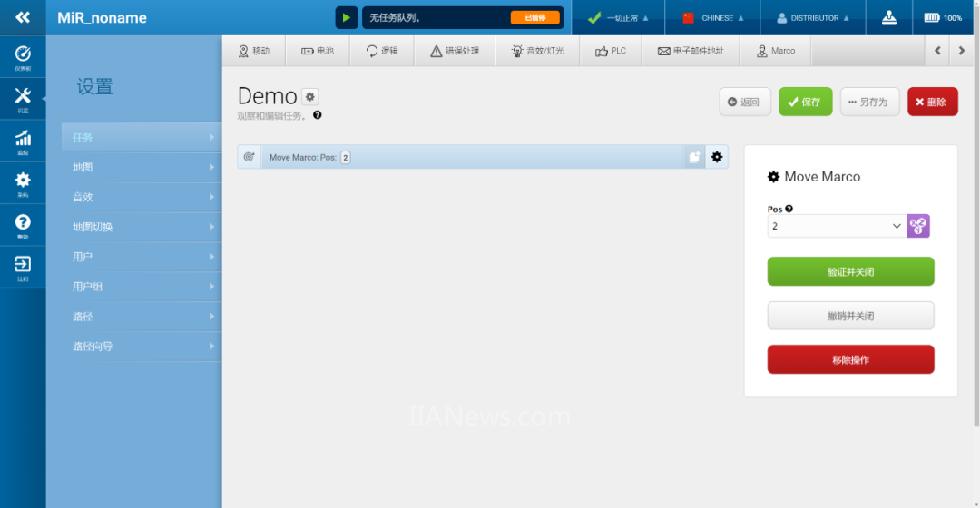
保存退出,之后编辑运行程序时直接调用该宏程序并点击?。在弹框中选择需要移动到的点位即可。后续修改尝试次数或者停靠精度只需修改宏程序即可。
*所有带有标识参数都支持宏程序的功能,如:寄存器,播放音效创建日志等等。
移动命令Plus
相信小伙伴们在项目中都曾遇到过:无论现场指导以及地面标识多么明确详尽,都无法避免现场操作人员仍随意将货物或者其他障碍物放置在小车运行的通道上。这样往往造成小车达到路径尝试次数上限而在途中报警并停止运行。那有没有什么方法可以让小车一直等待而不是报错待在原地不动,同时,还能对障碍物区域做出一些语音提醒呢?这里我们就会使用【尝试/捕捉】这个命令来应对这种情况。
首先,进入到设置 > 任务中创建一个名为【Move Plus】的宏程序。
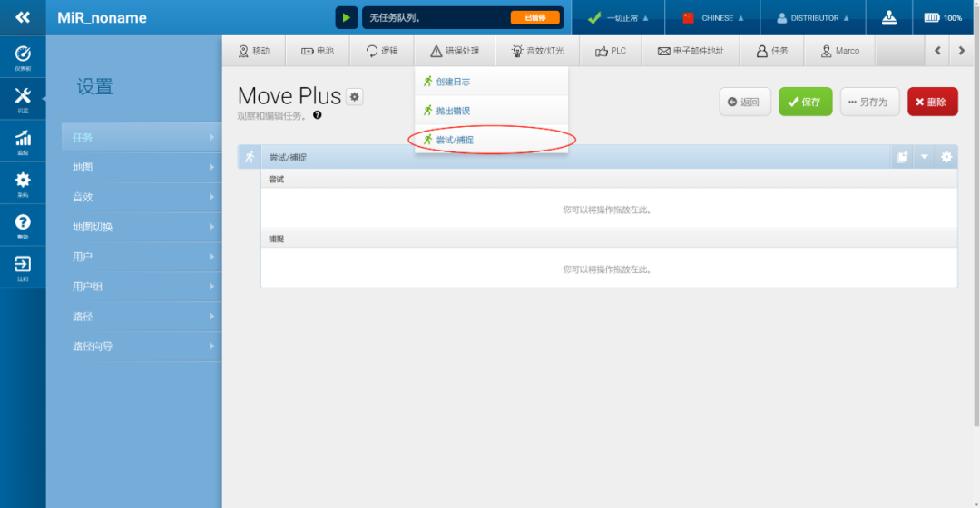
在下图所示选项中可以找到【尝试/捕捉】这个命令。
按照下图所示完成程序编辑。
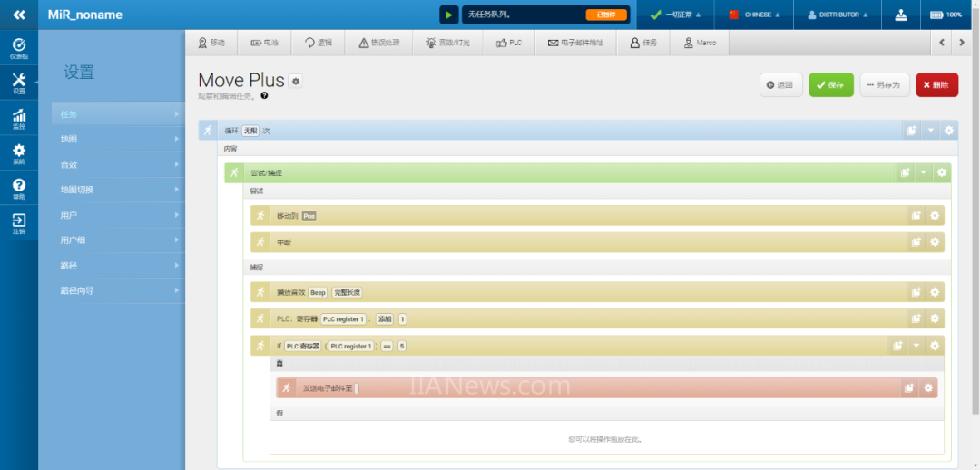
我们来大致讲解下这个任务的流程:
首先,最外面的循环指令保证了【尝试/捕捉】的无限次的循环。
在尝试中的中断确保当小车到达Pos位置时能够跳出这个无线循环执行主程序后续的指令。
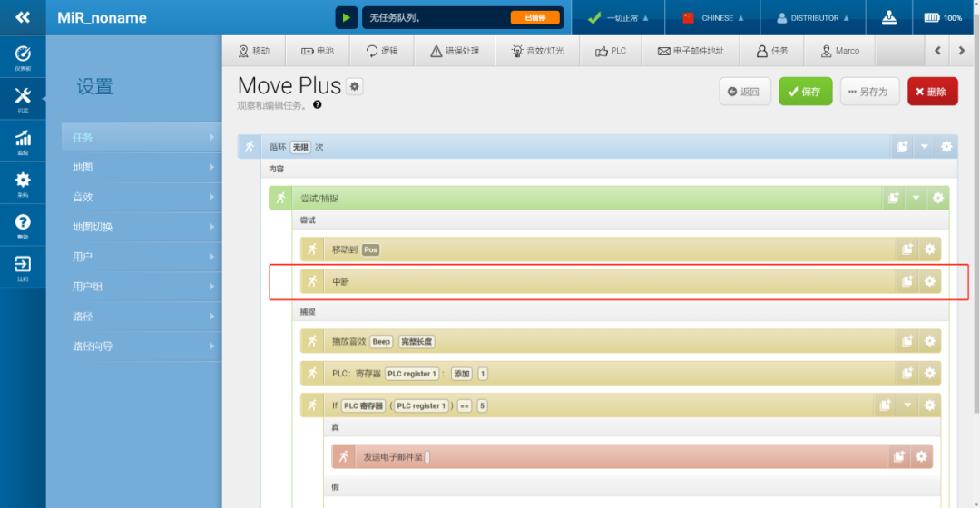
捕捉中的【播放音效】,当【尝试】中的移动失败后会跳转到捕捉指令内并播放一段提示音提醒现场人员加以关注。
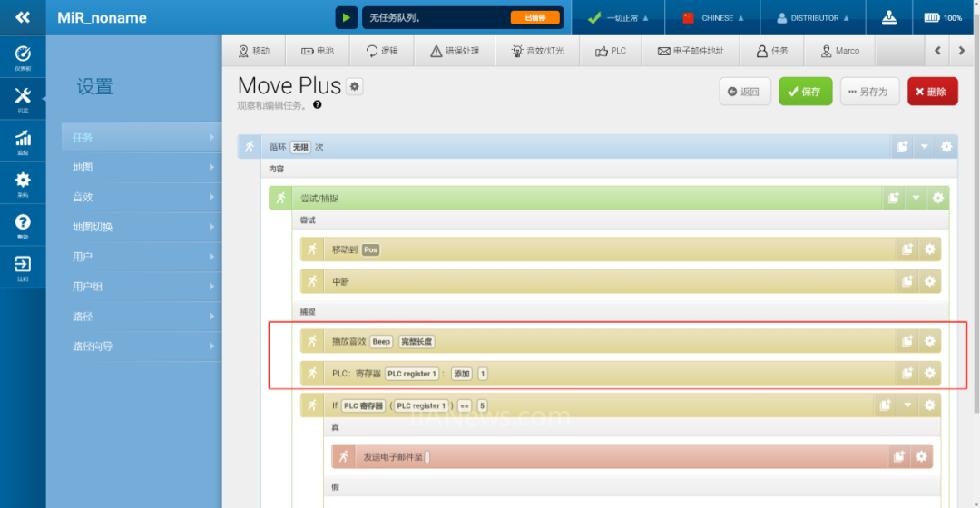
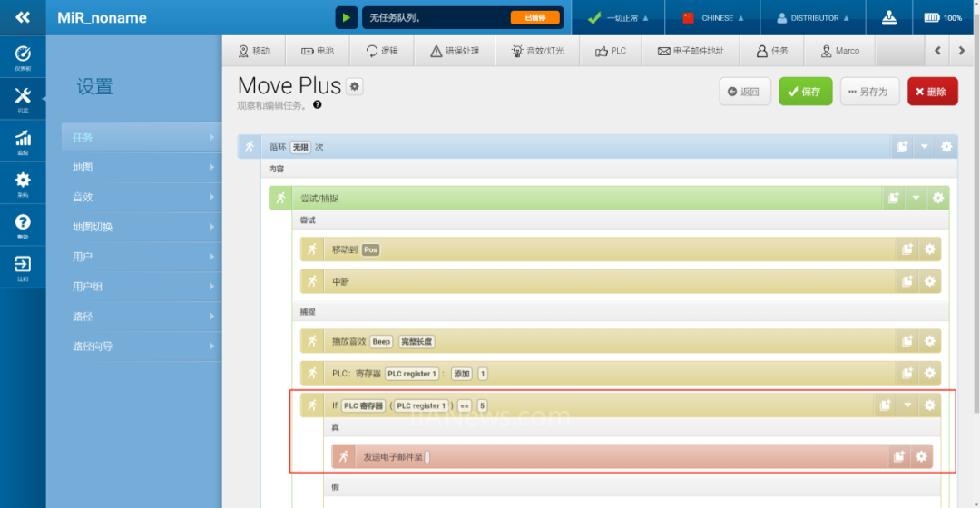
PLC寄存器对【尝试/捕捉】的循环测试进行累加,当次数达到5次时会跳转到if循环并执行发送邮件给设备工程师的功能。(当然也可以通过其他方式来提醒设备工程师了解小车遇到的情况)。
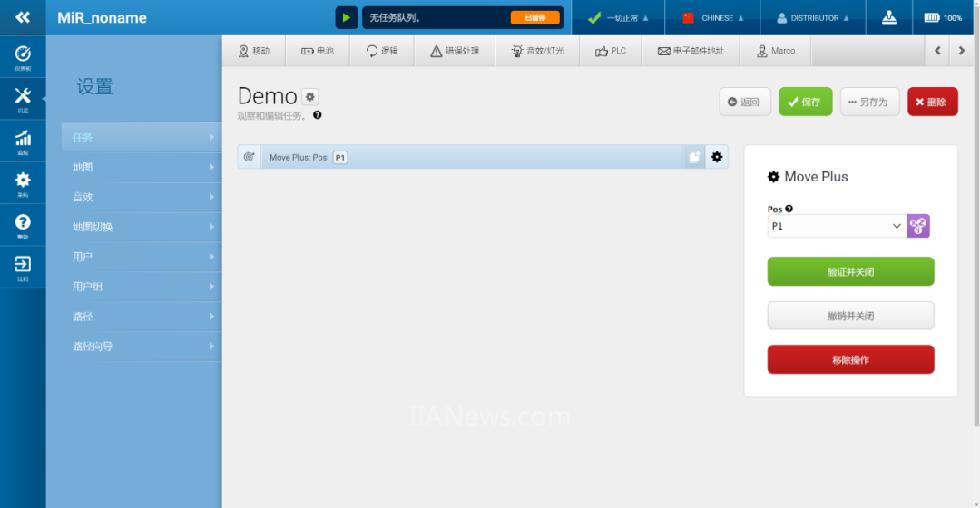
在运行程序中调用【Move Plus】来完成对所有点位的相同逻辑配置。





































































 京公网安备 11011202001138号
京公网安备 11011202001138号