
机器人电机在不通电的情况下,电机通过合上抱闸保证电机位置,保证机器人各轴不会受重力而跌落。
如果在一些紧急情况下,不能通过示教器操作移动机器人,此时需要通过手动松各轴抱闸来移动机器人。松抱闸前,必须做好安全防护。要松抱闸的对应轴做好吊装准备,以免松抱闸后机器人跌落砸伤人员。
1)此时若控制柜有电,则可以通过按机器人本体上对应各轴松抱闸按钮来移动机器人各轴,如下图:

2) 若此时控制柜无电,即控制柜无法给电机抱闸提供24V控制电,此时最快捷方法为:
a.打开电机盖
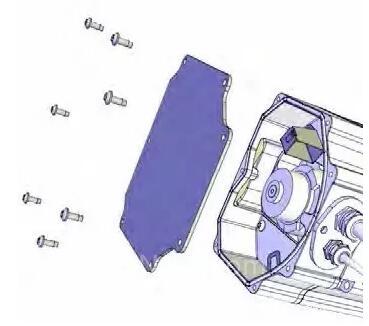
b.将电机的动力线插头拔下

c.根据电路图找到抱闸端子,直接提供24V,抱闸即可打开

该图为IRB6640 二轴电机示例,其中针脚2和5为抱闸接线端子





































































 京公网安备 11011202001138号
京公网安备 11011202001138号